For the MLX300, the Current Position or Teach Point data has a Config value. This number explains the pose of the robot that is currently in or when the point was taught. For a TCP position, there could be multiple orientations for the robot to achieve the same TCP position. Typically, this number is “4”. This document will explain how this number is generated and how it compares to the standard controller.
Position Config Number Corresponds to the Type Data of a P-Variable
The list and chart below explains each of the 6 pose definitions, which were shown on the Position Variable screen under <TYPE>.
6 Pose Components:
- FRONT / BACK
- UP / DOWN
- FLIP / NO FLIP
- S<180 / S>=180
- R<180 / R>=180
- T<180 / T>=180
Config Number Bit Definition
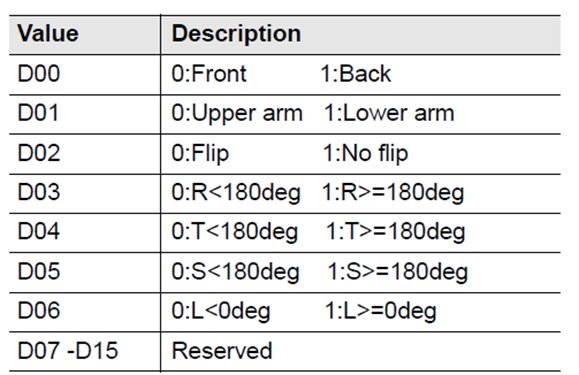
The Config number is a 16 bit DINT number and the first 7 bits are used to define the pose of the robot’s position.
For example, if the Config value is 4, the D02 (2^2=4) = 1: No Flip
Teaching the point will always generate the correct Config value. If a point is calculated, it should copy the correct Config value from a taught point in the same work area of the robot.
Comments
0 comments
Please sign in to leave a comment.