Introduction
When programming a YRC1000 or YRC1000micro robot it is possible to move faster than the maximum linear interpolation speed. This is handled with a VMAX tag. Under the right conditions it can improve cycle-times around 30%. What are the advantages and limitations of VMAX?
VMAX Explained
VMAX is a tag used with the MOVL command. It allows the controller to accelerate the robot to speeds higher than the rated max linear speed (EX: 1500mm/sec). VMAX values are in percentages ranging from 50% to 100%.
Definition: VMAX is the rate with respect to the maximum speed of each axis.
Examples:
MOVL VMAX=100 means the motion is performed at the TCP without exceeding the maximum speed of each axis.
MOVL VMAX=50 means the motion is performed at half speed of TCP speed when VMAX=100 is set.
How to Use VMAX
|
1. In the job, cursor over to the instruction side (make sure the move command is MOVL) |
 |
|
2. Select the instruction…to go into Detail Edit |
 |
|
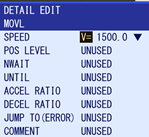
3. Cursor over to the speed tag and press select (spacebar) to select the VMAX tag |
 |
|
4. Cursor over to the value to choose how much from 100% to 50% |
 |
|
5. Press Enter twice to update the instruction line |
 |
VMAX Tips and Best Practices
Depending on the condition of the programmed path, the TCP speed may not be stable since the speed of each axis is controlled not to exceed the maximum speed during operation. It is best if VMAX speed is used where the motion with stable speed is not required.
- The VMAX tag is designed to only work on the YRC1000 and YRC1000micro controllers
- The VMAX tag can only be used with linear move commands
- The VMAX tag works best when the linear move commands have few taught positions in between…see below for details.
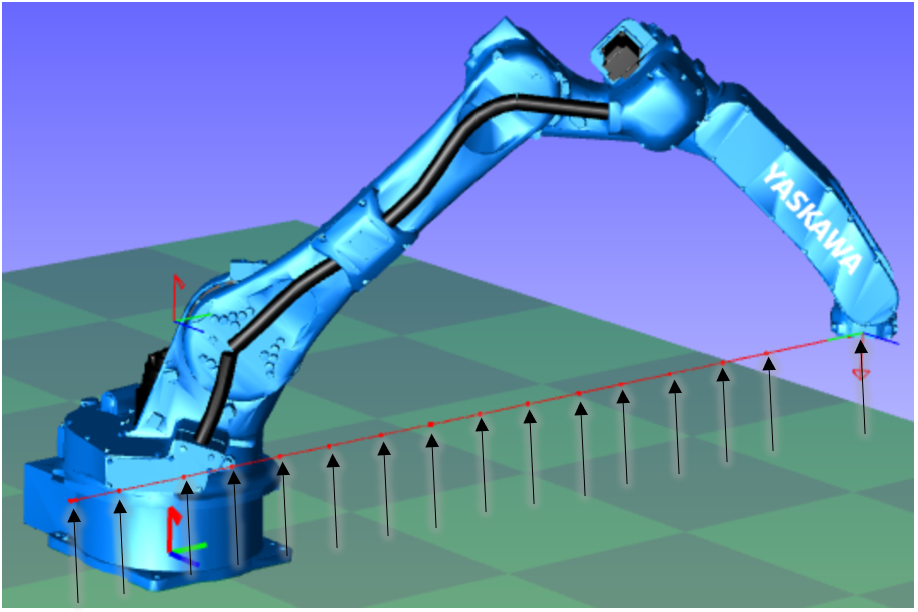
Figure 1: Small move instructions
In Figure 1 the robot has 16 taught positions which does not give much room for the robot to accelerate.
Example: without the VMAX tag the cycle-time was 1.82 sec…with the VMAX tag the cycle-time was 1.82 sec.
This not an ideal use of VMAX.
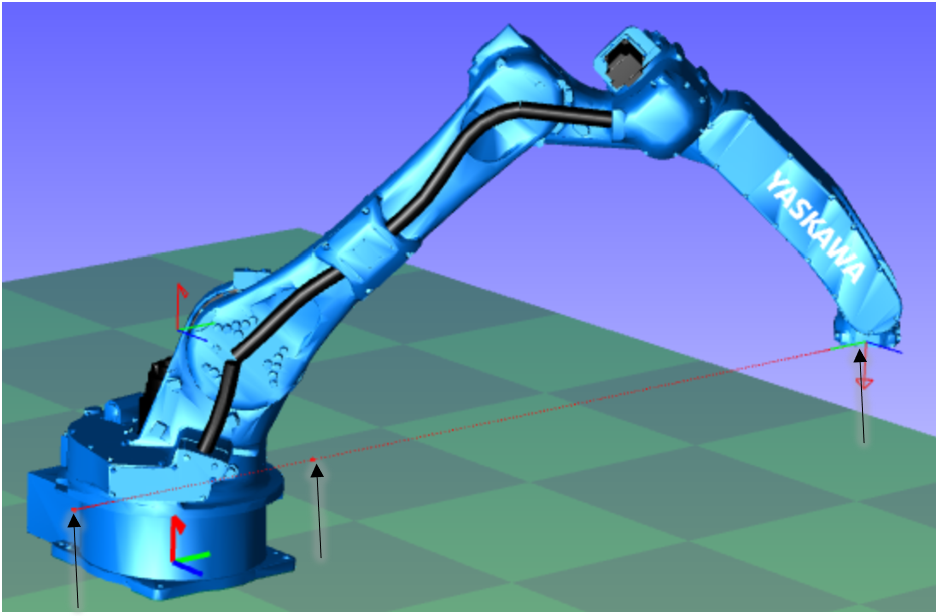
Figure 2: Large move instructions
In Figure 2 the robot has only 3 taught positions with large gaps in between.
Example: without the VMAX tag the cycle-time was 1.53 sec…with the VMAX tag the cycle-time was 1.20 sec.
This is an ideal use for VMAX because there is plenty of space for the robot to accelerate.
Comments
0 comments
Please sign in to leave a comment.