TAUGHT LINE COORDINATES
Taught Line Coordinate is a parameter enabled coordinate providing a fifth coordinate selection.
This coordinate frame changes to match the programmed path. Given this, the path must be previously programmed and the job must be run using FWD/BACK or Test Start. Either of these allows the controller to calculate the path and create a coordinate on that path line.
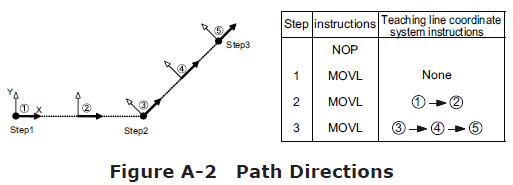
XYZ Directions towards a MOVL
This coordinate does not create a Cartesian Coordinate. The angles between the directions are calculated and are not always 90 deg. X+ and X- directions will always follow the programmed path when the MOV is a linear. The Y direction will always be orthogonal (90 deg) to the X direction, but will always be parallel to the ground (base). The Z axis is always Z in the Base Frame.
The rotational keys; Rx, Ry, and Rz also do not follow convention.
Rx adjusts the torch angle relative to the ground
Ry rotates the torch around the Z Axis of the Base Frame
Rz rotates the torch around the Z axis of the Tool Frame
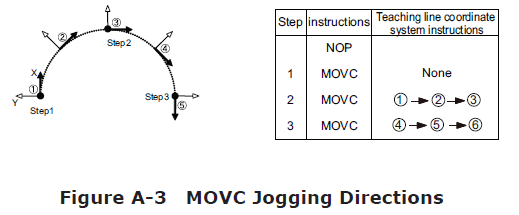
XYZ Directions towards a MOVC
As the controller moves the robot towards a MOVC, the jogging calculations for the X direction will move the robot on a tangent to the circular path. The Y direction will be perpendicular to the circular path, again parallel to the ground (base). The Z direction will again be the same as the Z axis in the Base Frame.
CAUTION! Jogging the robot after using the FWD/BACK Keys cancels the path interpolation. Using FWD/BACK keys will move the robot directly to the cursored point.
NOTE: MOVS jogging calculations are similar to those of MOVC. The Y direction is not calculated to be perfectly perpendicular to the path.
Limitations of Taught Line Coordinate
Since all of the directions are calculated from the MOV_s programmed in a job, there are times when the controller cannot jog in the Taught Line Coordinate.
Causes of not being able to jog with Taught Line:
• A job has not been selected.
• These is no MOV_ instruction at more than two points in the job.
• The amount of movement between the cursored MOV_ instruction and the point before is short (<3mm).
• The cursored move instruction is a MOVJ.
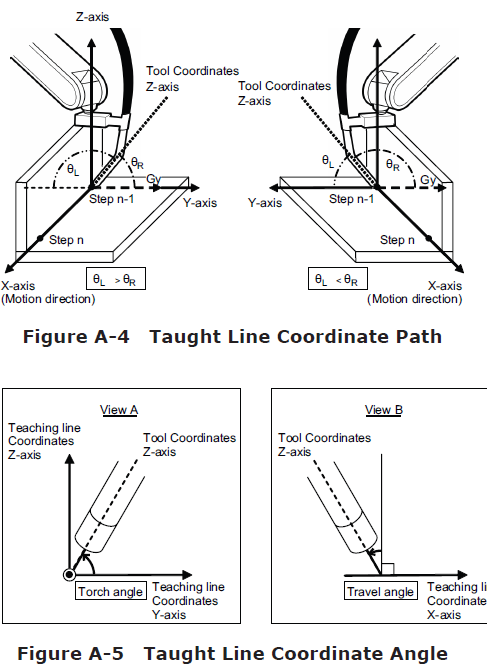
At times, the posture of the robot restricts the ability to jog the robot. When the Taught Line Coordinate is selected, the Welding Angle Display is shown at the bottom of the pendant screen.
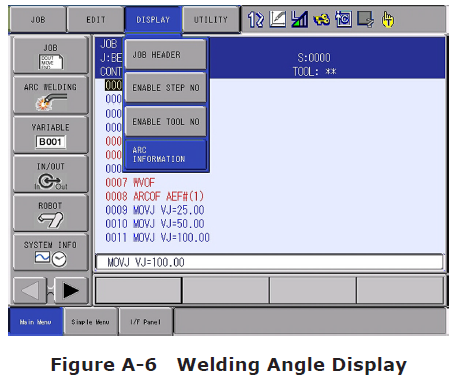
Neither the Ground Angle (torch) or the Rotation Angle (base Z) can exceed +- 88 deg. Attempting to jog when this has occurred results in the robot stopping movement and the message “Teach line JOG move not allowed in this area.” Jogging in a different coordinate system may be required.
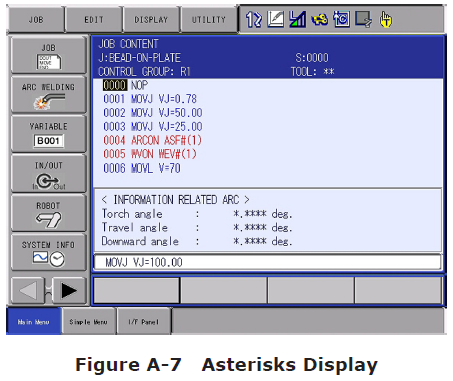
Attempting to jog in Taught Line Coordinate when any of the Welding Angle Display elements is filled with asterisks will also result in the message indicating that jogging is not possible.
NOTE: There may be cases when inserting a move between ARCON and ARCOF that the position will display the asterisks. If asterisks are displayed the position must be modifyed. To modify the position press the MODIFY key then press ENTER.
Comments
0 comments
Please sign in to leave a comment.