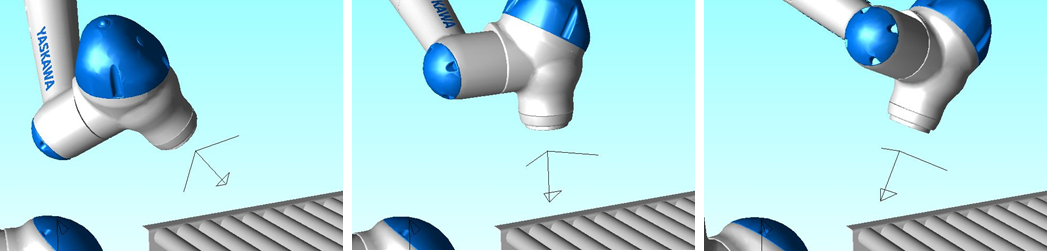
A robot’s Tool Center Point (TCP) is described by a Position (X, Y, Z) and Orientation (Rx, Ry, Rz). The Orientation describes the angular rotation of the TCP. For example, the picture below has three different TCPs that have the same Position but different Orientation.
When jogging a robot, the behavior of the Rx, Ry, Rz directions will vary based on the selected Jogging Mode.
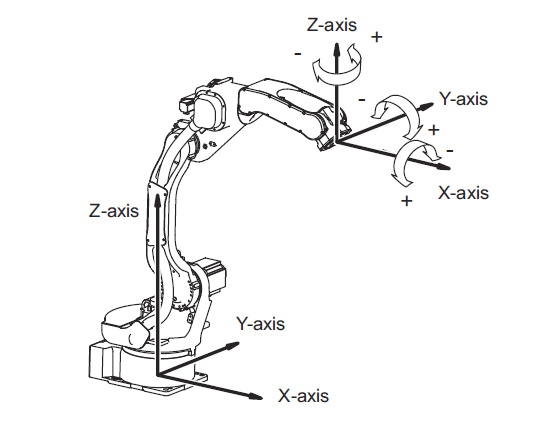
For World/Base coordinates, the Robot TCP will rotate around a frame parallel to the Robot base.
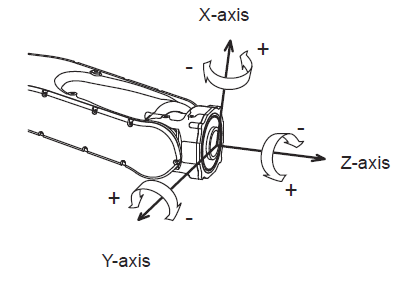
For Tool Coordinates, the Robot TCP will rotate around a frame attached to the TCP:
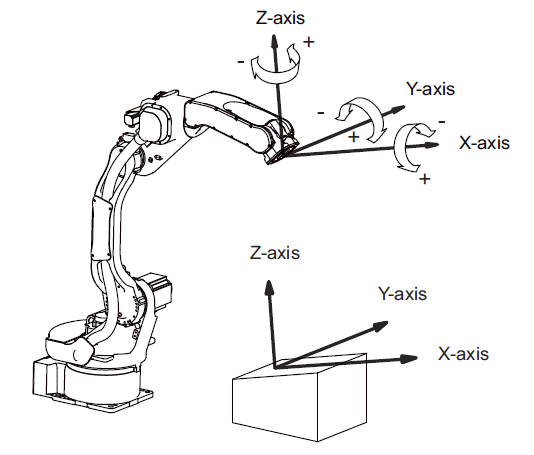
For User Coordinates, the robot TCP will rotate around a frame attached to the User Frame.
Comments
0 comments
Please sign in to leave a comment.