Function Description
It is often convenient to use the internal torque sensors of an HC robot to determine the location of a rigid work surface/part. This function will enable the HC robot to search for an object using the built in torque sensor feedback.
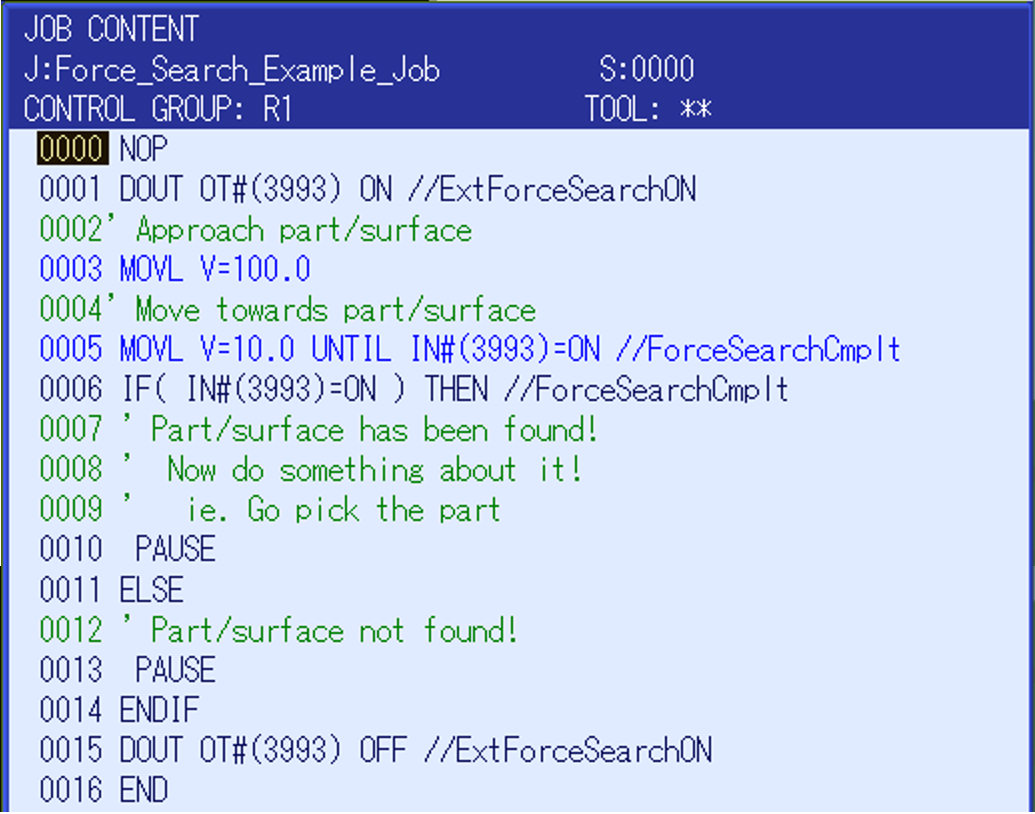
The function is implemented using the MOV UNTIL command in an INFORM job. The robot will move to the programmed position until Input #3993 comes on. This means the threshold force was achieved. Output #3993 enables this function when turned on.
Required Signals
| System Resource | Signal Description |
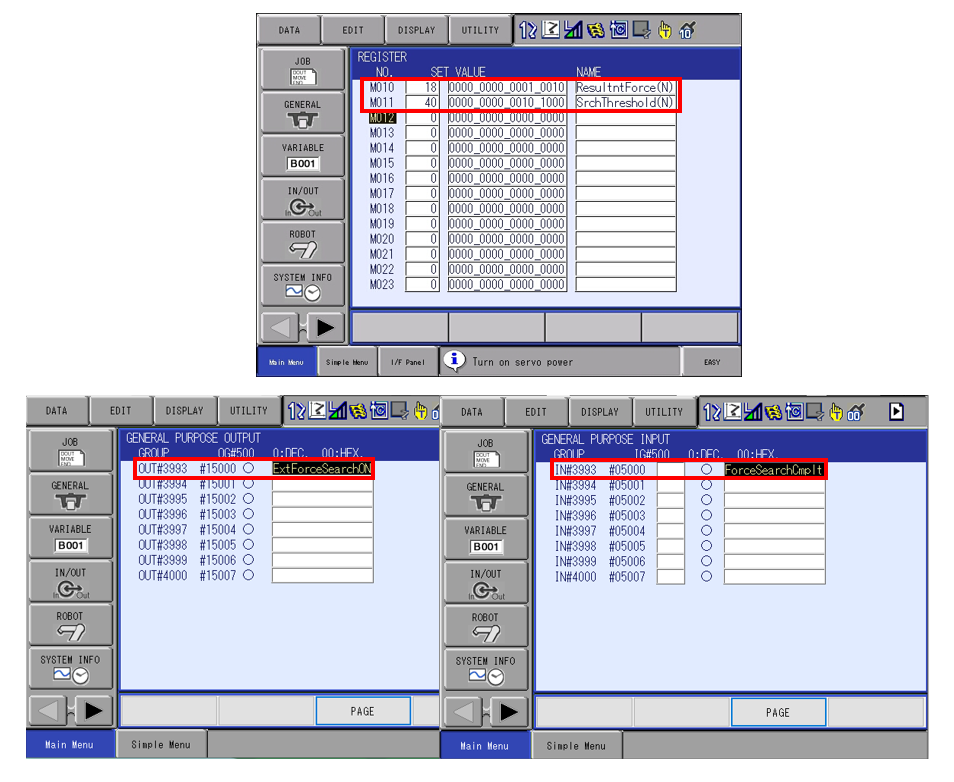
| M-Reg 10: Resultant Force | Concurrent I/O writes this value, user does not set. |
| M-Reg 11: Search Threshold | User must enter this value. Units = N. |
| Output #3993: Enable the Force Search Function | User sets this. |
| Input #3993: Force Search Threshold Achieved | Concurrent I/O sets this, user does not set. |
*Note that these signals could be modified to fit a system's needs.
Implementation
Note: Please keep in mind the Force Threshold Search must be less than the active FSU External Force Limit. Otherwise, the robot will stop in a PFL stop during the force search. When testing this function, 140N was set for the External Force Limit and 40N for the Search Threshold (M-Reg 11).
(1) Label these M-Registers and Input/Output, enter a force value into M11. 40N makes for a good starting point.
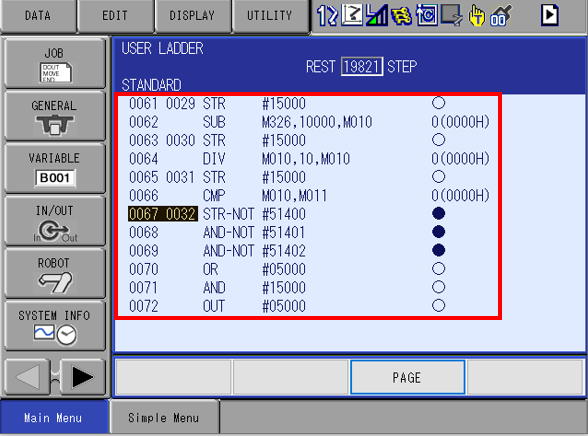
2. Make these Concurrent I/O modifications.
3. Load the attached sample job 'Force_Search_Example_Job.JBI'.
Comments
0 comments
Please sign in to leave a comment.