Alarm Description
The robot motion was interrupted during pullback.
*Note: Alarm 4095[3] was renamed starting with YBS2.44. Older controller software referred to this alarm as Alarm 1105[8501] SYSTEM ERROR (SERVO).
Alarm Troubleshooting
This alarm is most likely caused by a Power and Force Limiting (PFL) setup error. Please confirm the following:
(1) Multiple robot Tool Files must be defined for each EOAT + Payload condition (ie. one tool is defined for just the EOAT and another is defined for EOAT + product).
(2) Confirm tool data (Mass and Center of Gravity) is accurate. If you do not have CAD data for your tool it is no problem, please use the automatic tool estimation feature.
Smart Pendant Tool Mass Estimation Procedure
YRC Pendant Tool Mass Estimation Procedure
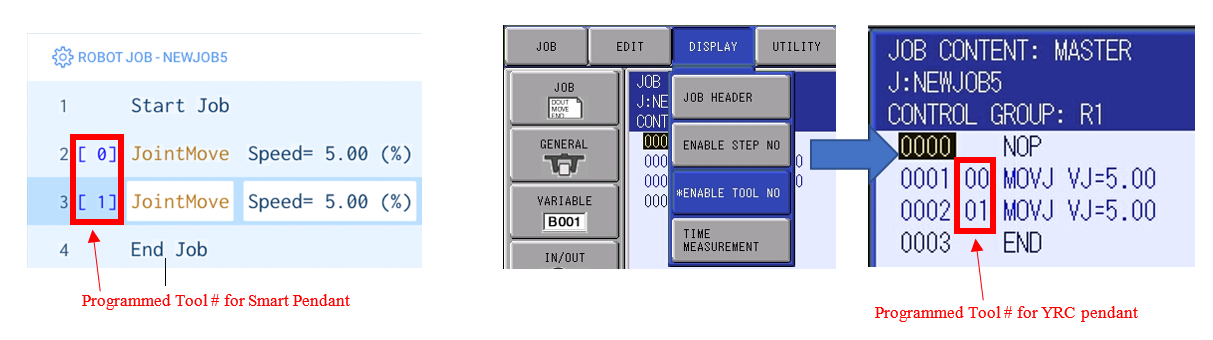
(3) Confirm that your robot jobs are using the correct tool numbers in the robot job.
(4) Confirm that a torque sensor calibration has been done.
Smart Pendant Calibration Procedure
YRC Pendant Calibration Procedure
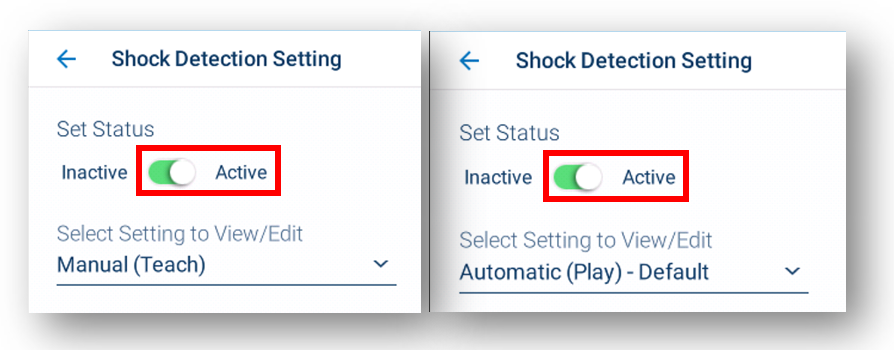
(5) Confirm Shock Detection function is enabled.
For Smart Pendant: {Robot Settings} -> {Shock Detection}, confirm the Teach and Play Mode default settings are ‘Active’.
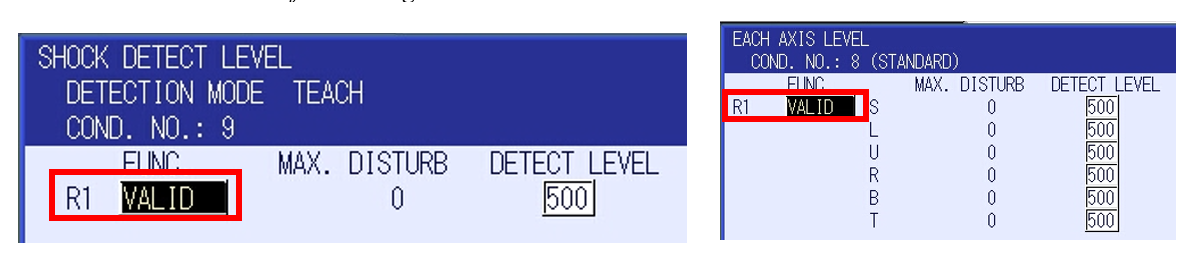
For YRC Pendant: {Robot}-> {SHOCK SENS LEVEL}, confirm the Teach and Play Mode default settings
are ‘VALID’.
Comments
0 comments
Please sign in to leave a comment.