Alarm Description
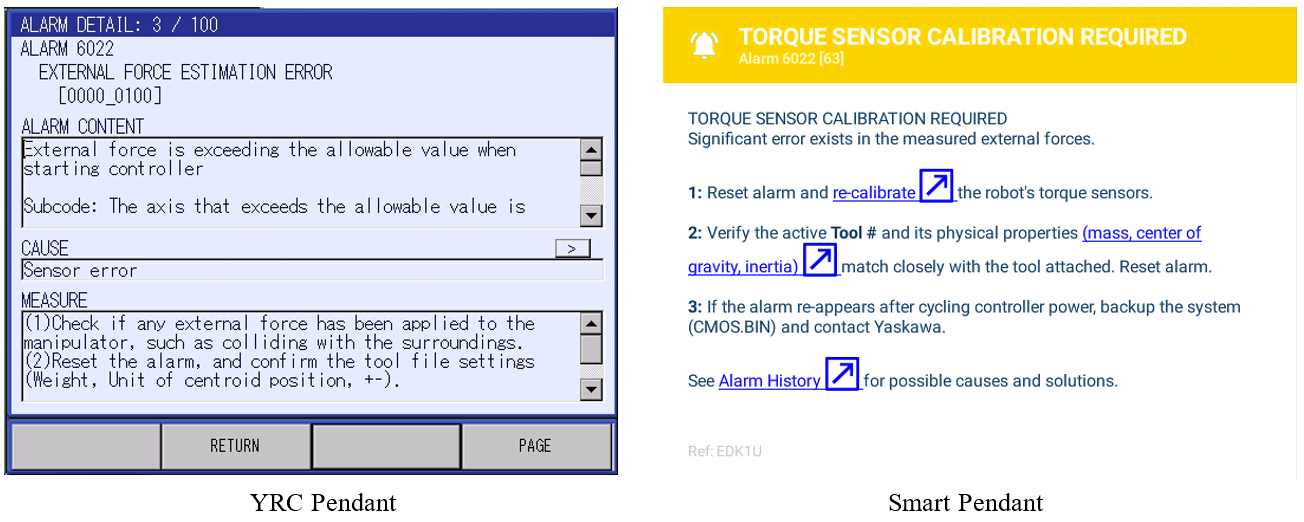
When the robot controller boots up, it checks all six torque sensors to verify if they are under an allowable error value. These errors values are unique to each axis and robot model, shown below.
This is the controller’s way of telling you that there is a setup problem with PFL (Power and Force Limiting)!

Alarm Troubleshooting
(1) Make note of the alarm sub code. Using the below diagram, you can interpret which axes are affected.
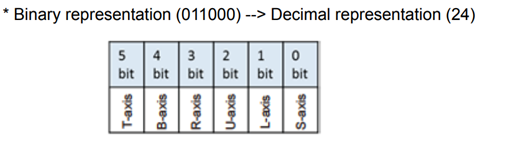
If the sub code is 63 or [0011_1111] then you know that the error for all six axis torque sensors is too large. Calibration is likely needed.
If the sub code is anything less than 63, then only one or a few axis sensors have too large an error. For example, if the sub code is 4 or [0000_0100] then the only problem axis is the U-axis.
(2) Confirm that the robot has accurate tool data (mass, center of gravity) for the current tool configuration. If you don’t have this information, you can use the built-in controller function to estimate these values for you.
Smart Pendant Tool Mass Estimation Procedure
YRC Pendant Tool Mass Estimation Procedure
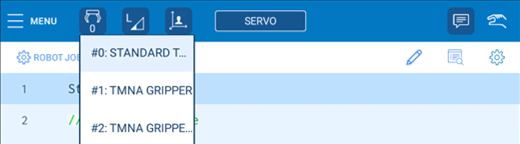
(3) Confirm that the appropriate tool is selected as your active tool.
From YRC Pendant press SHIFT + TOOL SEL to set the active tool, then actually jog the robot with that tool to set it
active.

From Smart Pendant, select the tool from the tool icon in the upper icon bar, then actually jog the robot with that tool to set it active.
(4) Perform a Torque Sensor Calibration.
Smart Pendant Calibration Procedure
YRC Pendant Calibration Procedure
(5) Verify your setup!
Job the robot to 2 or 3 arbitrary locations and take a look at the TCP Resultant Force. If this force is less than about 30N for HC10/HC10DT or less than about 40N for HC20DT in any of these positions, then your setup is correct.
YRC Pendant: {SAFETY FUNCTION} -> {Force Monitor}
Smart Pendant: {Safety Settings} -> {Force/Torque Watch}
(6) Cycle power to the robot controller. Alarm 6022 should not recur. If it does, please carefully revisit Steps 1-5.
Comments
0 comments
Please sign in to leave a comment.