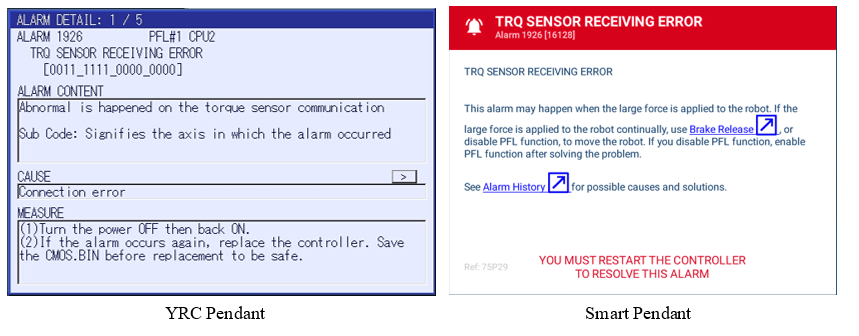
Alarm Description
The robot controller cannot communicate with the HC robot’s torque sensors.
Alarm Troubleshooting
(1) Make note of the alarm sub code. Using the below diagram, you can interpret which axes are affected.
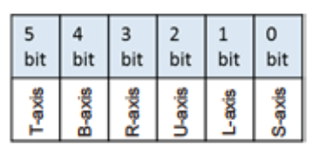
If the sub code is 16128 or [0011_1111_0000_0000] then you know the robot controller cannot communicate with all of the sensors. The first place you should check is the ‘TQ’ cable.
If the sub code is anything less than 16128 than only one or a few axes are failing to communicate to the controller. For example, if the error code is 8192 or [0010_0000_0000_0000] then the only problem axis is the T-axis. If something mechanically has changed with the T-axis it is possible there is a loose connector or failed wire harness inside the robot.
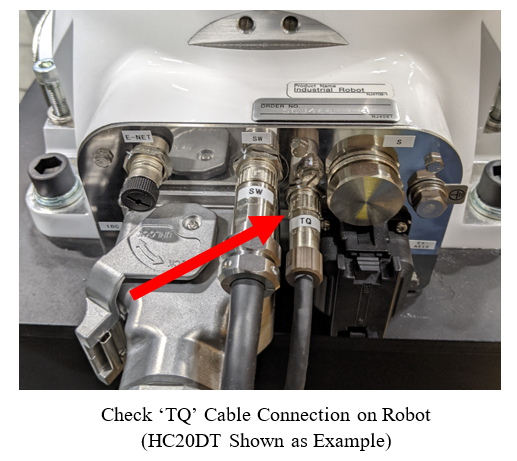
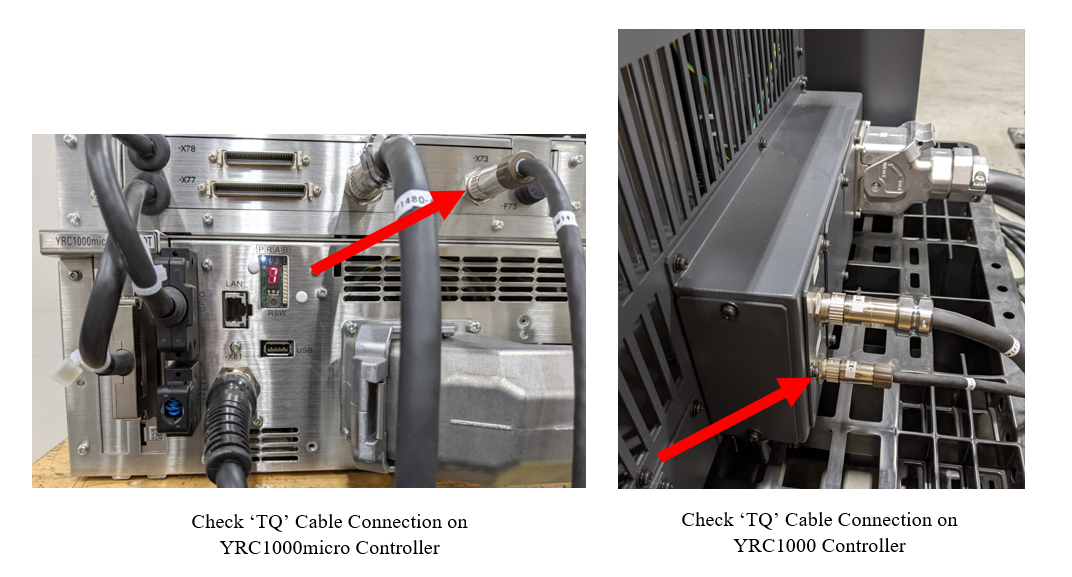
(2) The ‘TQ’ cable allows for torque sensor communication between the robot and the controller. Confirm that the ‘TQ’ cable is properly connected at both ends and is not damaged.
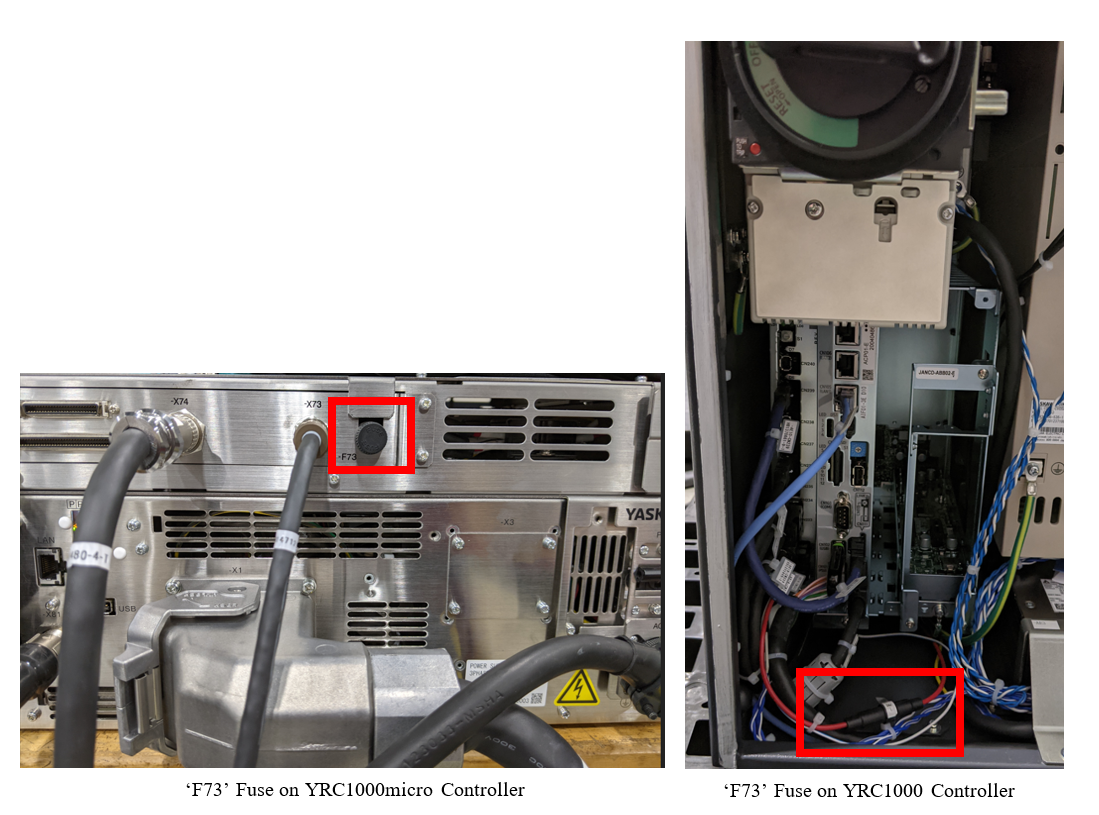
(3) Power down the controller and confirm the ‘F73’ fuse on the PFL board fuse is not blown. Specs for this fuse are shown below.

Comments
0 comments
Please sign in to leave a comment.