Introduction
The MotoSim TCP Reach tool is useful for quickly displaying if a robot can reach all needed locations. It either generates a 2D profile or a 3D “Bubble”, showing the reach.
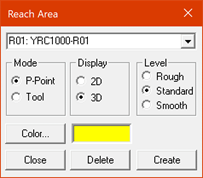
The Reach Tool ( ) can be found on the CONTROLLER Tab. It can be either based off the robot’s wrist (the P point) or the user-defined Tool Center Point (TCP) location.
) can be found on the CONTROLLER Tab. It can be either based off the robot’s wrist (the P point) or the user-defined Tool Center Point (TCP) location.
TCP Reach Tips
|
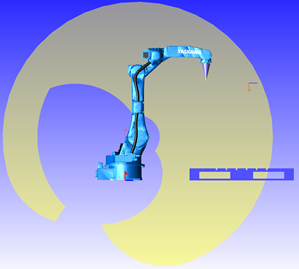
2D Reach Envelope
|
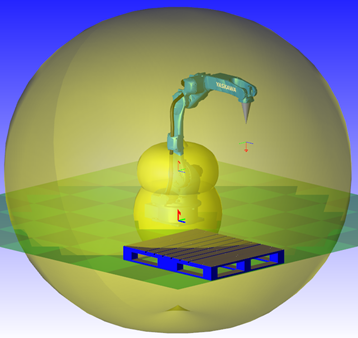
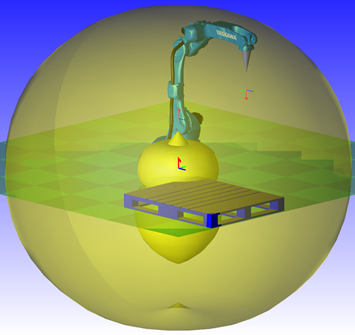
| 3D Reach Envelope (P-Point) | 3D Reach Envelope (Tool) |
 |
 |
|
The envelope is based on the P-Point, the link between the R and B axis. Note how the envelope only partially covers the pallet. |
Because the tool TCP is moved, the envelope is adjusted. Note how the envelope almost covers the pallet |
Comments
0 comments
Please sign in to leave a comment.