Introduction
The purpose of this document is to provide a better understanding of the information within the UFRAME.CND file and where it originates. As with all files modified after download, proceed with caution before uploading to the controller. The UFRAME.CND file will only contain user defined user frames. The file cannot be saved if no user frames are defined. To save the file, select EX. MEMORY - SAVE - FILE/GENERAL DATA – USER COORDINATE DATA
UFRAME.CND example file
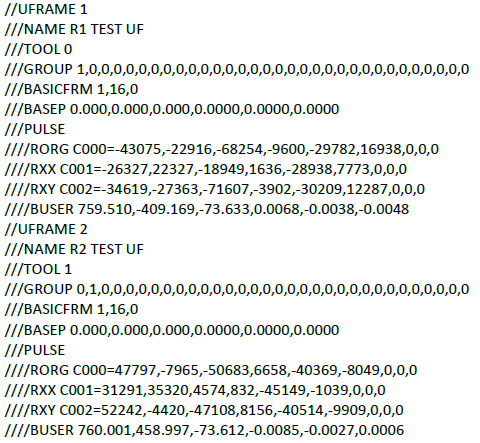
Explanation of File Contents
UFRAME = User frame number
NAME = User defined name given to the user frame
TOOL = Robot TCP used to create the user frame (all 3 positions must be recorded using the same TCP)
GROUP = Robot group referenced for the user frame. (Reading left to right R1, R2, R3, R4, etc. 0 = not referenced 1 = referenced. A user frame can only refence a single robot.
BASICFRM = Basic coordinate frame referenced. 2nd value 16 = Base Frame, 19 = User Frame, 20 = Master Tool Frame. 3rd value = user frame # referenced.
BASEP = location of base axis when the user frame was created. (Will read 0.000,0.000,0.000,0.0000,0.0000,0.0000 if base axis does not exist. Order of values: X, Y, Z, Rx, Ry, Rz)
PULSE = Coordinate frame of the taught user frame. (Will read PULSE in most cases.)
RORG, RXX, RXY data reads as follows: S, L, U, R B, T, 7th, 8th, 9th axes. (If axis is not used - will read 0.)
RORG = Recorded position of the user frame ORG (origin.)
RXX = Recorded position of user frame XX. (Establishes the user frame X+ direction.)
RXY = Recorded position of user frame XY. (Establishes the user frame Y+ and Z+ directions.)
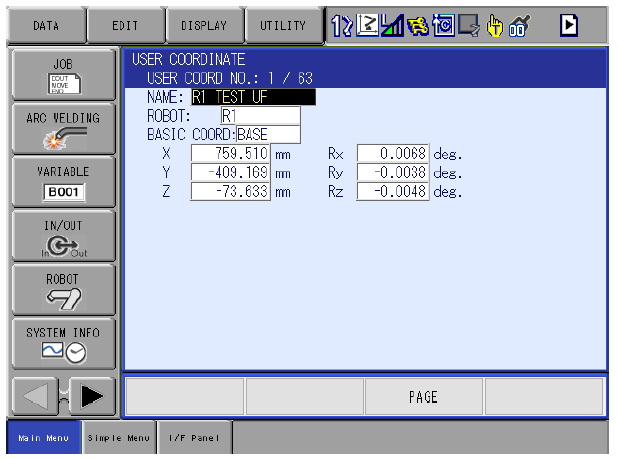
BUSER = distance from the referenced frame (BASICFRM) zero position to the TCP selected for the user frame definition at the ORG position. (Order of values: X, Y, Z, Rx, Ry, Rz.) BUSER can be displayed and edited from the teach pendant by selecting ROBOT - USER COORDINATE. Move the cursor to the defined user frame. Press DISPLAY from USER COORD list. Robot group, Basic Coord, position, and orientation of frame can all be changed from this page. See image below.
Comments
0 comments
Please sign in to leave a comment.