Introduction
This article describes the setup of multiple robots using the same controller in MotoSim EG-VRC
Procedure
- Create a New Cell
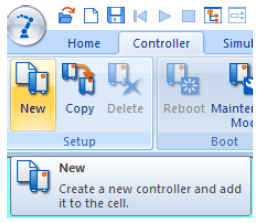
- On the Controller tab, select New in the Setup section
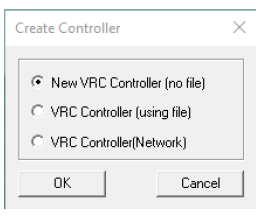
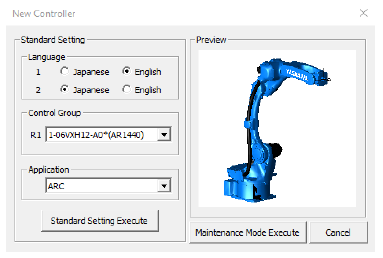
- Select New VRC Controller (no file). Click OK
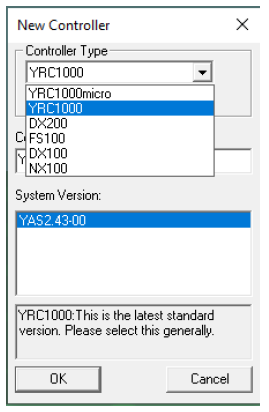
- Select Controller Type. Click OK
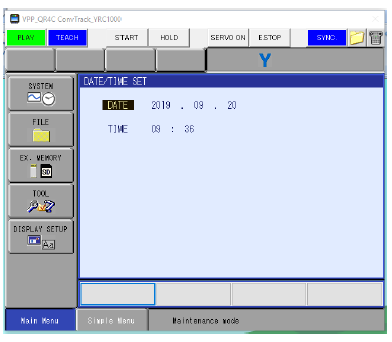
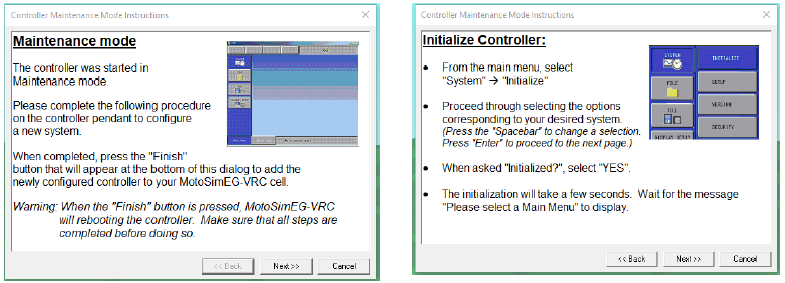
- Select Maintenance Mode Execute
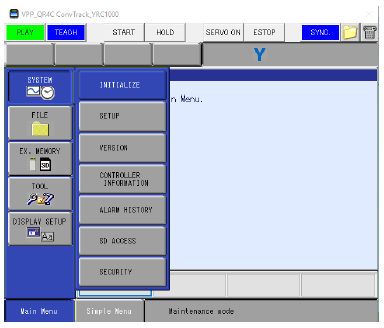
- On virtual pendant, select SYSTEM – INITIALIZE.
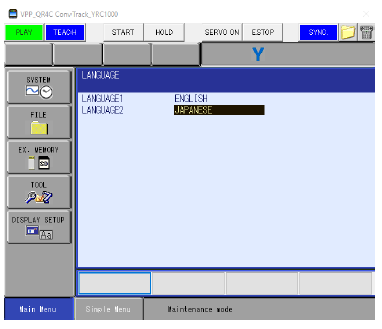
- Set Language. Press ENTER
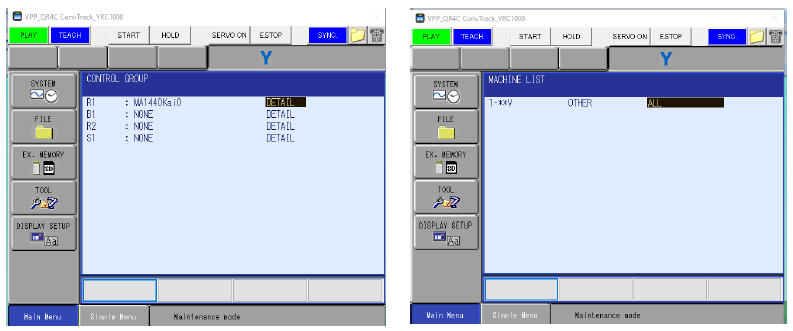
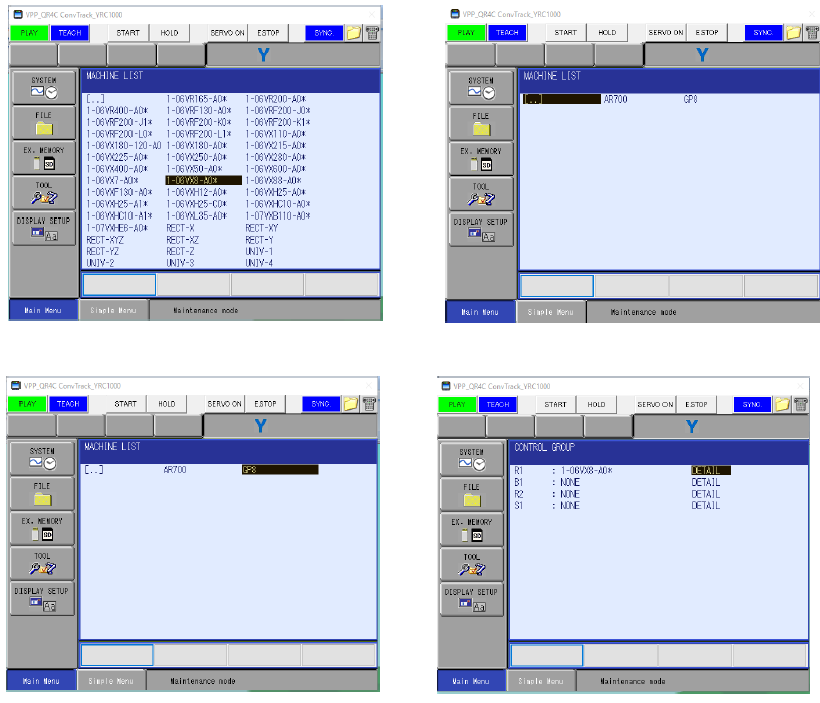
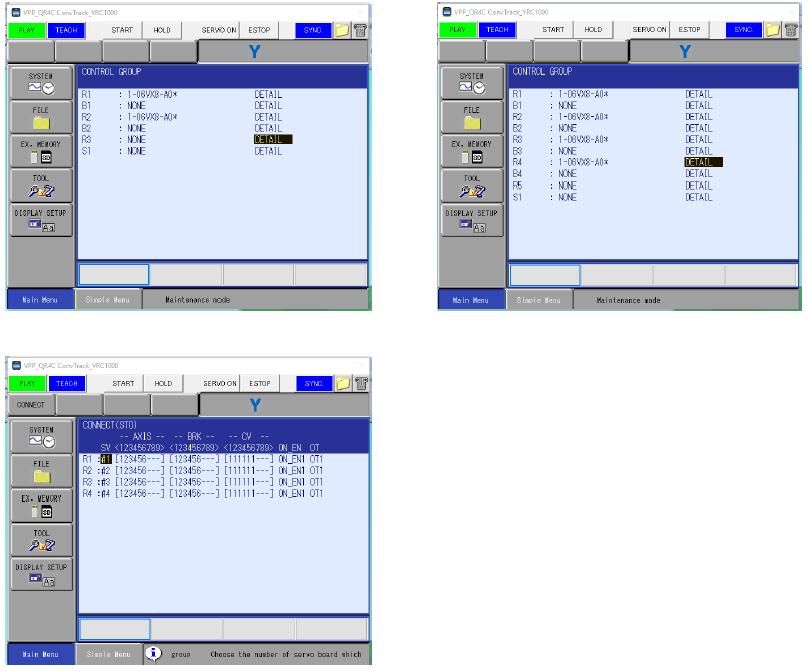
- Set R1, R2, etc. as needed in DETAIL of each line using SELECT (refer to MotoSim EG-VRC manual sec. 15.9 for robot list). Press ENTER until you are past the CONNECT (STO) screen
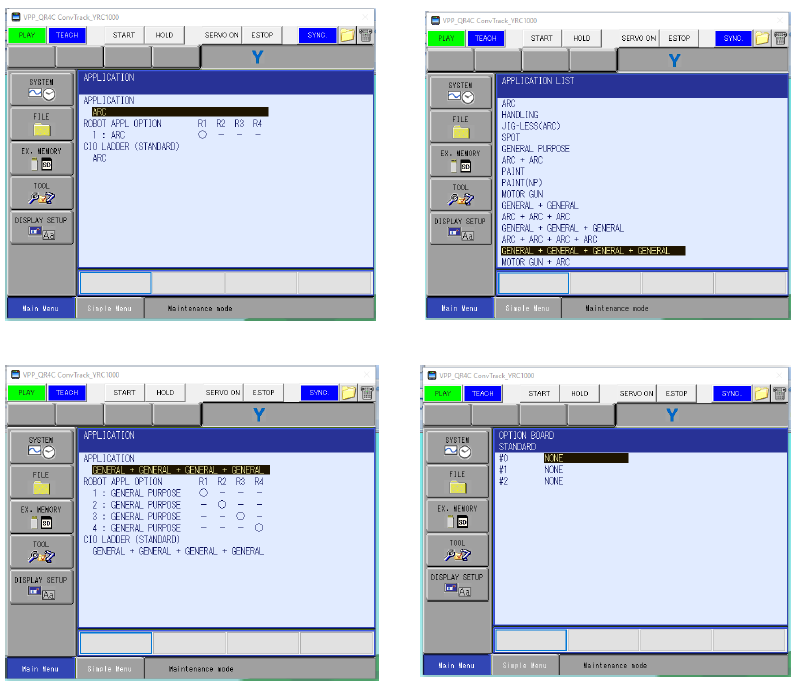
- Select APPLICATION (Application + must match robot count. If using 3 robots, application and ladder should be GENERAL + GENERAL + GENERAL. More than 4 read GENERAL * 5,6,7,8.) Press ENTER to confirm.
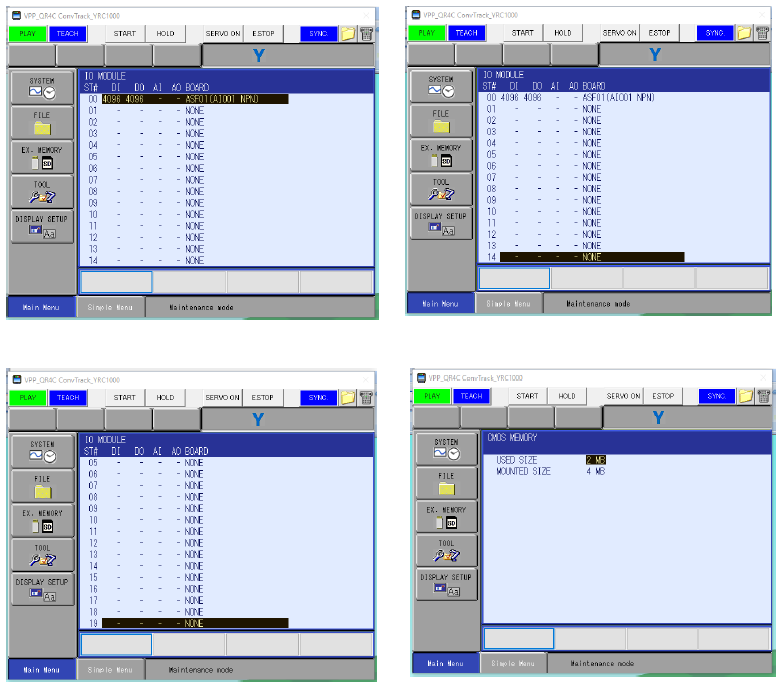
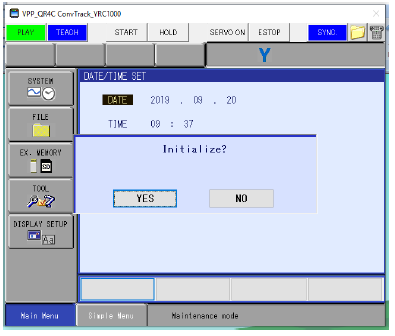
- Press ENTER until Initialize? Confirmation. Select YES.
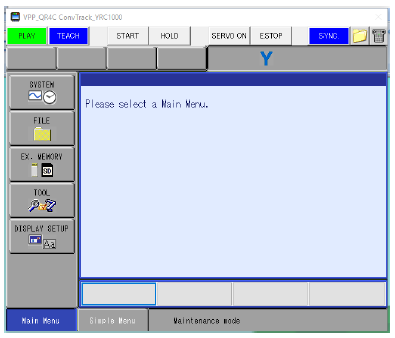
- Wait for Please select a Main Menu screen
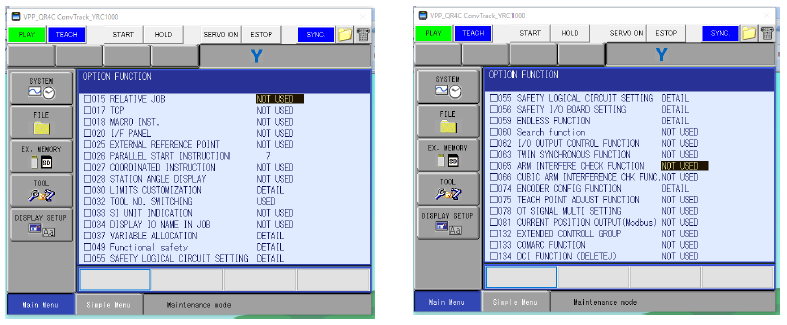
- Select SYSTEM- SETUP - OPTION FUNCTION to select robot options (such as Arm Interference, Relative Job, Coordinated Instruction, FSU, etc.).
* Robots in close proximity should have Arm Interference enabled and complete robot calibration(s)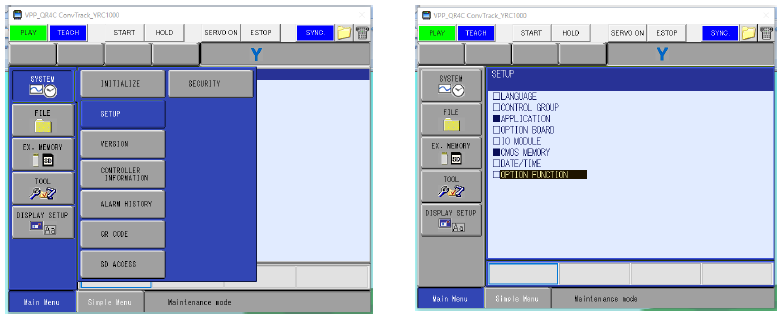
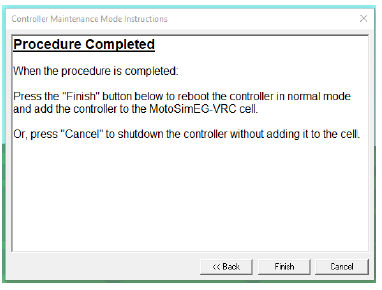
- Click Next on Controller Maintenance Mode Instructions window until the Procedure Completed window. Click Finish
- Click OK on Robot Settings window
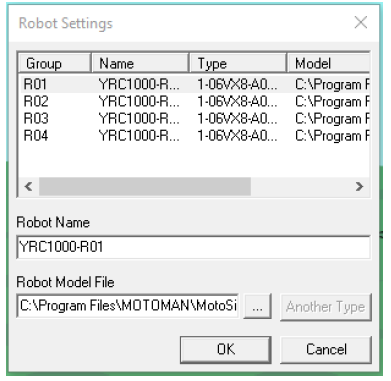
- Robots will automatically space 1M. Position robot(s) as needed with CAD Tree.
- Save progress
Comments
0 comments
Please sign in to leave a comment.