Smart Frame Jogging is a feature of the Smart Pendant created to make Cartesian jogging more intuitive. In this mode, the manipulator moves in Cartesian directions relative to the position of the Smart Pendant with respect to the robot base. This mode is the default mode of jogging on Smart Pendant.
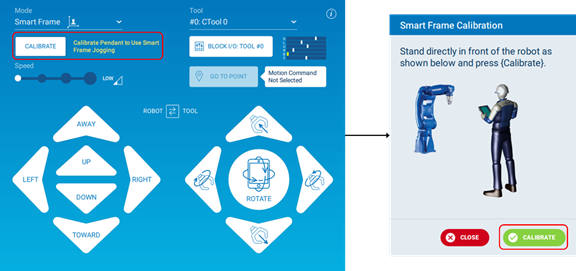
Before using Smart Frame Jogging, the system needs to be calibrated by pressing the {CALIBRATE} button. Then, stand directly in front of the robot as prompted in the pop-up and press the {CALIBRATE} button. This will need to be done once before Controller reboot.
There are two panels in this mode as shown below: Robot (1) and Tool (2).
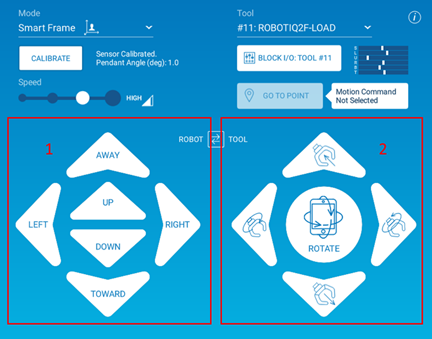
Robot Panel
This panel can be used to jog the position of the Robot TCP in directions relative to the Smart Pendant using the {LEFT}, {RIGHT}, {TOWARD}, {AWAY}, {UP} and {DOWN} buttons. For example, pressing the {LEFT} button will always move the robot in the left direction relative to the Smart Pendant even as the position of the Smart Pendant changes.
Tool Panel
This panel can be used to jog the orientation of the Robot TCP as well as move/rotate it along the TCP Z direction. To jog the orientation, press and hold the {ROTATE” button and then tilt the Smart Pendant in the desired directions of orientation.

The other buttons allow for easily moving the robot TCP after a proper orientation is found.
| Tool Button | Description |
 |
Move robot TCP in +Z direction with respect to Tool Frame |
 |
Move robot TCP in -Z direction with respect to Tool Frame |
 |
Rotate robot TCP around +Z Tool Frame axis (+Rz) |
 |
Rotate robot TCP around -Z Tool Frame axis (-Rz) |
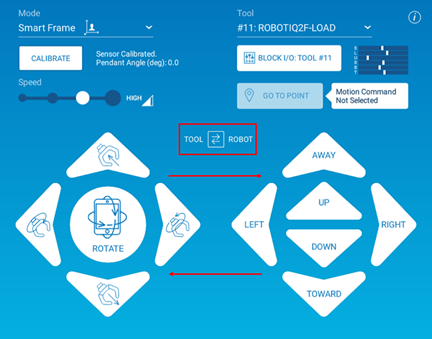
The Robot/Tool Toggle button in the middle of the screen can be used to flip the Robot/Tool Panels to the other side.
Comments
0 comments
Please sign in to leave a comment.