It is often useful to view the Robot Position in various coordinates to debug programs, verify positions or to relate a position to other known coordinates (e.g. pallets, conveyors, etc…). This can be done using the Robot Status Watch utility. This utility can be viewed in either a half-screen or full-sreen size and can be used in either Automatic (Play) or Manual (Teach) modes.
To open the Robot Status Watch, select {Main Menu}, {Utility}, {Robot Status Watch}.
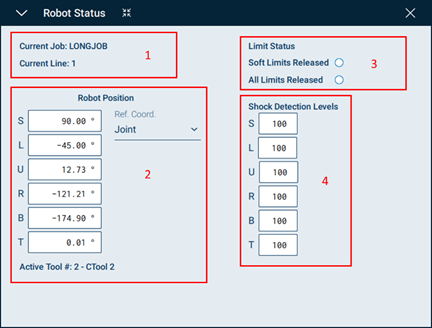
The following information can be viewed on this screen as labelled in the picture above:
- Current Job name and line. This will be updated as a job is executed.
- Robot Position. The “Ref. Coord” selection can be used to switch between Joint, World, Robot, and User coordinates.
- Limit Release Status
- Shock Detection Levels. This will display the currently active Shock Detection Level. Note: if Shock Detection is not activated on the controller, this information will not be displayed.
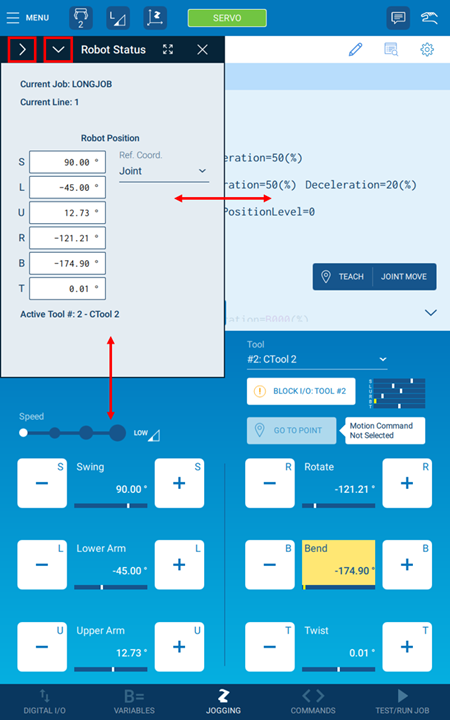
The Robot Status window can also be resized by pressing the collapse icon ( ). This is useful when only the Robot Position needs to be monitored as it allows for more of the screen to be viewed as shown below. This window can also be moved left/right or up/down using the arrow buttons on the top left of the window.
). This is useful when only the Robot Position needs to be monitored as it allows for more of the screen to be viewed as shown below. This window can also be moved left/right or up/down using the arrow buttons on the top left of the window.
Comments
0 comments
Please sign in to leave a comment.