Abso recovery procedure
The below procedure will walk you through recovering lost absolute data.
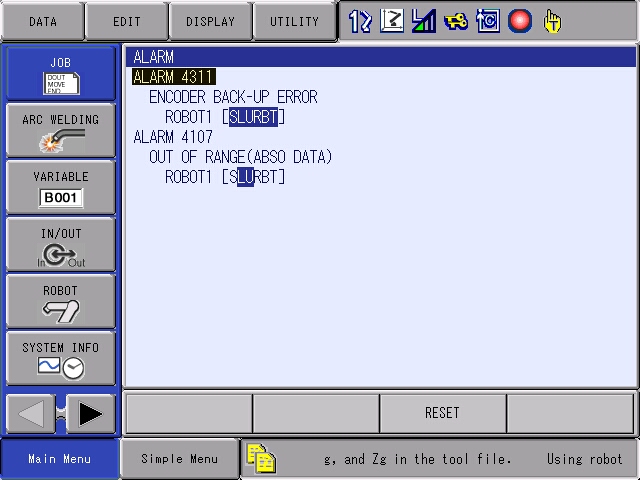
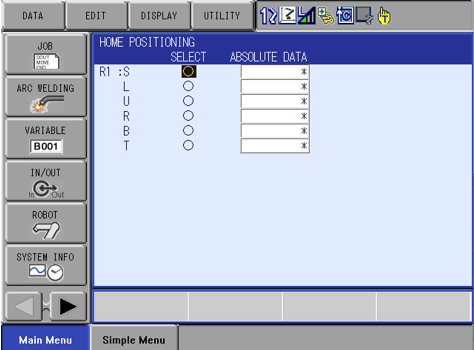
If abso data is lost due to and encoder communication issue or after preventative maintenance was performed, this should be the first method attempted at recovering the absolute data. If the abso data is lost, you will see the alarms pictured below and see an * in the abso data box under the home position menu as shown.
Upgrade to management or safety level security
Manually jog whichever axes have lost data to the witness marks on the arm and get them aligned as close as possible.
Select on the utility tab, then select “Recover Backup ALM”
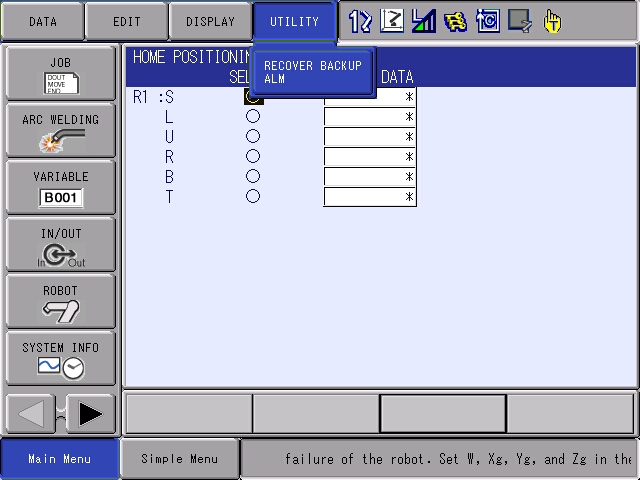
The following screen will be shown.
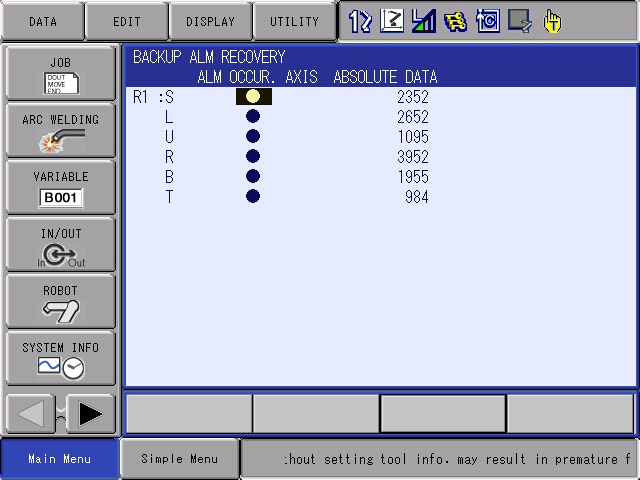
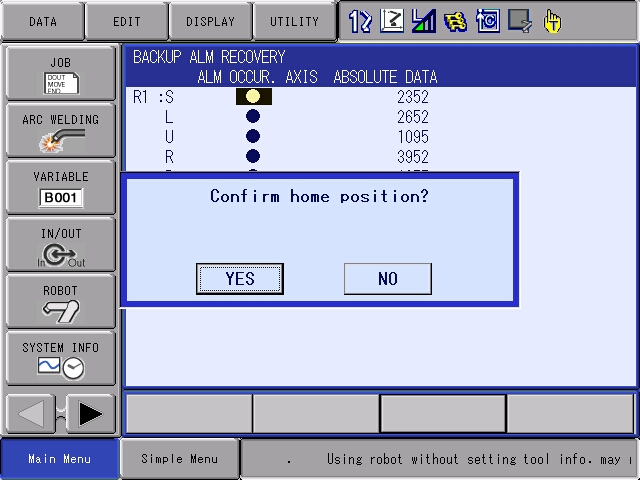
Cursor down and hit select on each axis that has lost abso data. It will prompt you to confirm the recovered data. Select yes.
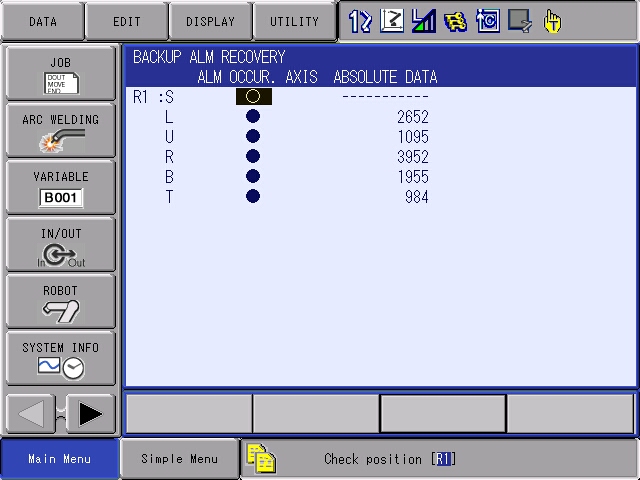
Once the abso data for that axis has been recovered, you will see a dotted line.
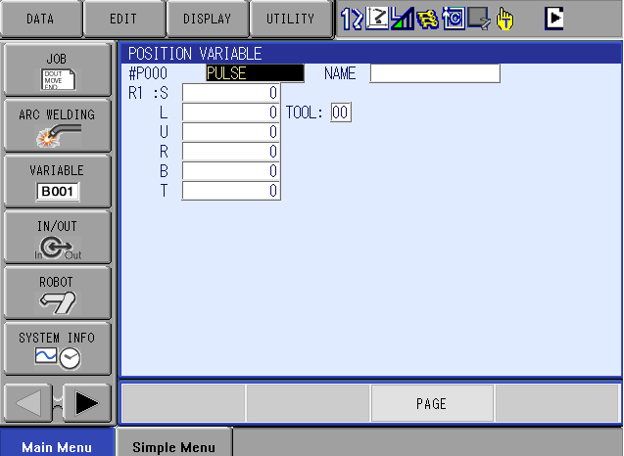
Once all axes have been recovered, verify the data is accurate. Jog the robot to a current position of 0 for each axis. The easiest way to do this is to create a P variable and make it a pulse data type PVAR and make each axis 0. Then FWD to this PVAR.
If the abso data recovery worked correctly, the robot should not move at all. If any of the axes moves just slightly, then the abso data is off by one revolution. Either add or subtract 4096 (4000 for XRC controller) to the abso data for that axis and see which one brings the witness mark to the correct alignment. If the robot moves off the witness mark by a considerable amount, then most likely the abso data was incorrect to begin with and will need to be manually re-homed. See the links below to manually re-home the axis as a secondary method to recovery.
DX200 - How to set home position on all axes
DX200 - How To Set Home Position For An Individual Axis
Comments
0 comments
Please sign in to leave a comment.